

A team of researchers at the Hong Kong University of Science and Technology have developed a robotic fingertip that is capable of changing its shape and switching across different three configurations that enables it to grasp a variety of objects.
Video Credits: kzc tony, YouTube
In order to perform tasks that include handling or moving of objects, the robots are required to adapt their manipulation strategies and grasp depending on the characteristics of the objects and their surroundings. A majority of the robotic arms that have been developed so far have a fixed and limiting structure. This means that such robotics arms are capable of performing a set number of movements and can only grasp objects that are of specific type.
The details about this fingertip are available in a paper that was presented at this year’s IEEE International Conference on Automation Science and Engineering (CASE). This fingertip is inspired by origami which is a famous art form of paper folding in Japan.
Zicheng Kan and Yazhan Zhang were the researchers who carried out this study. They said, “Our study was inspired by two common observations in current research and industrial applications. The first relates to parallel grippers developed in past research studies, which could help to achieve industrial automation. These grippers require well-selected grasping points, otherwise static equilibrium might not be achieved”
For the past many years, researchers have been trying to develop techniques that would allow them to control the grasping poses of the robotic grippers. The main aim behind this study was to develop a fingertip that was easily controlled and is capable of performing a number of poses.
Zicheng Kan and Yazhan Zhang said, “The other past observation that inspired our study is that for a stable grasp, engineers have to design a specific clamper fixed on parallel gripper for manipulations, e.g. pick and place, etc. It is tedious when an item on the assembly line is changed with a different shape, which leads to an inefficient manual replacement of the clampers. The morphing fingertip we created could help to mitigate or overcome this issue.”
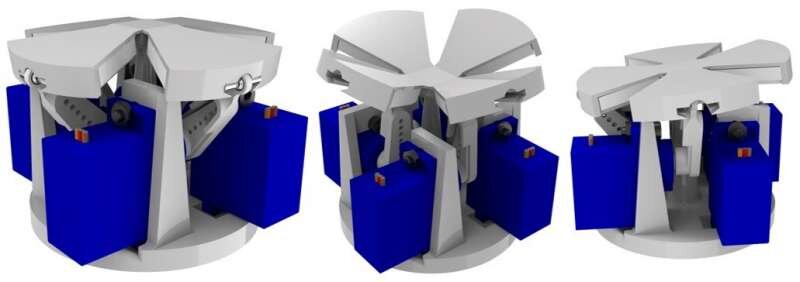
This new shape morphing origami based fingertip which is developed by Zicheng Kan and Yazhan Zhang along with their colleagues from the Hong Kong University of Science and Technology is primarily made out of two components. One of which is a soft origami skeleton which is capable of acting as a morphing surface for the fingertip and the other is motor driven four bar linkages that are serving as actuation and transmission mechanisms.
In the future this shape morphing fingertip can be incorporated into a number of humanoid robots that are existing or are newly developed. This technology costs $5 to make, excluding the control board and is quite cheap. This technology can be useful in automation of assembly line processes while reducing the costs that are associated with continuously changing the shape of products.
The researchers found that this shape morphing fingertip has many advantages to offer such as the ability to shift swiftly in between different morphing primitives and grasping modes also between the stable and dexterous grasp modes depending upon the task at hand.
Along with a lot of advantages and benefits that are offered by this shape morphing fingertip, it still has a number of tests of run and some issues to address before it is available for commercialization.



{kind=link}