

TO YOUR WILL
3rd October, 2018
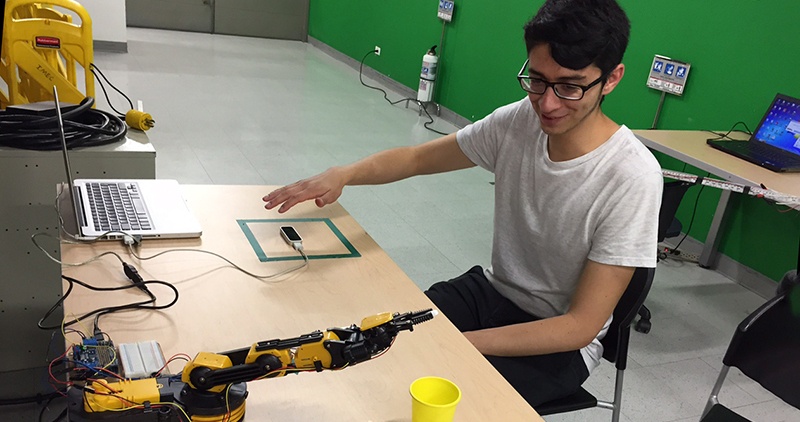
We simply wrapped up the Human Computer Interface challenge in the current year’s Hackaday Prize, and this undertaking is pushing limits we’ve barely observed previously. [Giovanni Leal] is utilizing a Leap Motion controller to move a mechanical arm around in space.
The robot arm being referred to originates from Owi, and it is by each measure not a decent robot arm. It is, be that as it may, an astounding toy loaded up with engines and plastic linkages that fills in as a decent remain in for a legitimate mechanical arm.
Control of this toy robot arm is done through a Leap Motion controller. While the Leap Motion is a couple of years old now, it is an exceptionally viable approach to ‘measure’ the position and revolution of a turn in 3D space. The main thing that is required is simply the Leap Motion controller and a tabletop.
The final product is a robot that can be controlled by a hand. While this robot arm is extremely only a toy, it was amusing to gather and a smidgen of equipment hacking with an Arduino transformed this into a working robot arm controlled by a human. Scale this up, build up an island den, and you’re en route to assuming control over the world.
(Image:-hackaday.com)



{kind=link}