


The development in the robotics technology had led to more advanced robots that could perform various tasks. In certain labour intensive sector, the robots have out performed their human counterparts. This has been the main reason why people are preferring to use the robots.
The robots could perform all the less important tasks while the important tasks could be performed by humans. Using the same vision, Samsung patented a robot which could clean the place for humans. They believe that this robot is more accurate and could clean the entire place himself only and do not require any kind of manual help.
Why this technology?
Robot cleaner, as the name suggests cleans the room. These robots are specially made for cleaning the rooms, removing the dust from the room while driving. The main thing about these robots is that they do not require any kind of manual help.
The need for these robots arises from the fact that people have become more dependent on robots and want to depend on less on other humans for the work. Also, these robots offer much better service and the cleaning quality is also good. These robots could be used in many places like the restaurants, your homes or some big workplace.
How does this technology work?
The robots clean the room without any assistance from the human. They judge by themselves that where is the next obstacle and how they have to move in the room. This adds to the advantage of these robots. These robots clean the room while driving. They also form the map of the entire room while cleaning the room. The map is generated on the basis of the correct position information and a control method of the robot cleaner.
Also Read: 10 Best Robots Of The World That Were Present Since Industrial Revolution
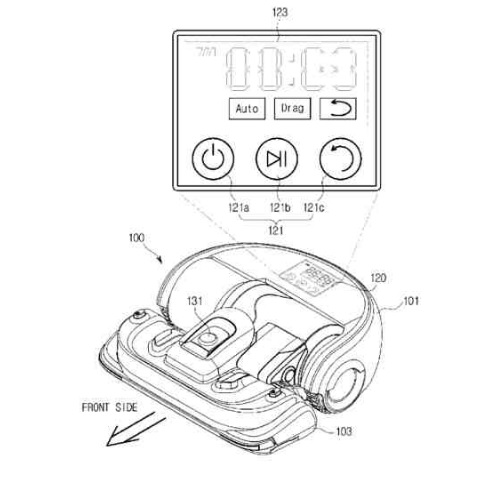
The robot cleaner includes a body, a driving unit which is configured to move the body, a signal detector which is configured to detect the output signal from the docking station, a position detector which is configured to acquire the information about the first position of the body during the movement of robot, a storage which is configured to store the information about the first position the body which is acquired by the position detector and a controller.
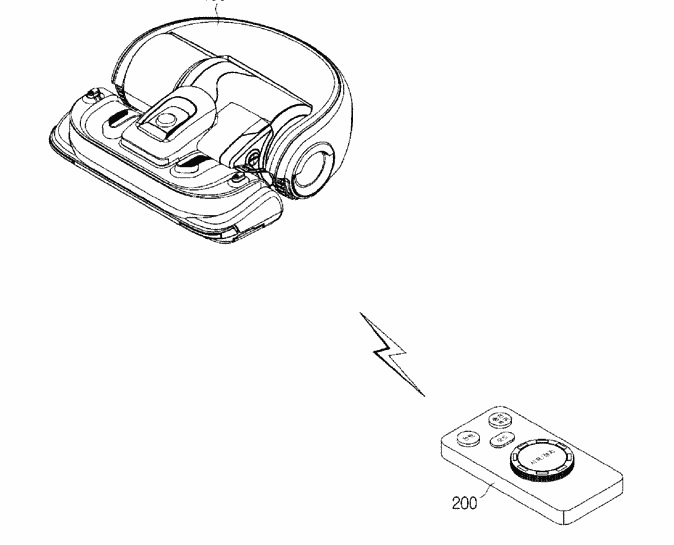
Now, when the output signal is detected from the docking station while the robot is moving, the robot is configured to estimate the information about the second position of the body based on the output signal from the docking station. It is also configured to correct the information about the first position of the body based on the information about the second position.
The controller then corrects the information about the first position of the body so that a difference between the first position of the body and the second position of the body is minimum. The controller then generates the map based on this stored information while the robot is moving and cleaning the room.
When the stored information about the first position is corrected, the controller updates the map based on this corrected information.
The controller then acquires the position of the docking station by estimating the point of directions of the output signal by filtering the output signal. It then detects different positions according to the probability based filtering method using Bayes filter during the movement of the robot. The position of the docking station is also detected with the help of the intensity of these output signals.
Also Read: The Complete Anatomy Of Humanoid Robot Design !
The robot cleaner typically generates the map by using Simultaneous Localisation And Mapping (SLAM) technology. The SLAM is a method which is used to generate a map using the estimated location of a robot at the same time of the movement fo the robot.
Since the robot does not acquire a cleaning region, the robots are needed to calculate their position to generate the map. Now, while estimating the location there is the slight chance of error which could lead to the generation of the different map than the actual map of the room.
What’s next?
The nest challenge for the Samsung will be to implement this technology in the real world. The whole operation is based on estimating the current location of the robot, which could also lead to the error.
Now, Samsung needs to ensure that the location estimation is pitch perfect as this could lead to the generation of the different map which would make the working of these robots inefficient.
Also Read: Artificial Intelligence 101: Breaking The Common Myths Around AI
Image Source: gizmodo.com



{kind=link}