

Worked by Designed Expressions
8th September, 2018
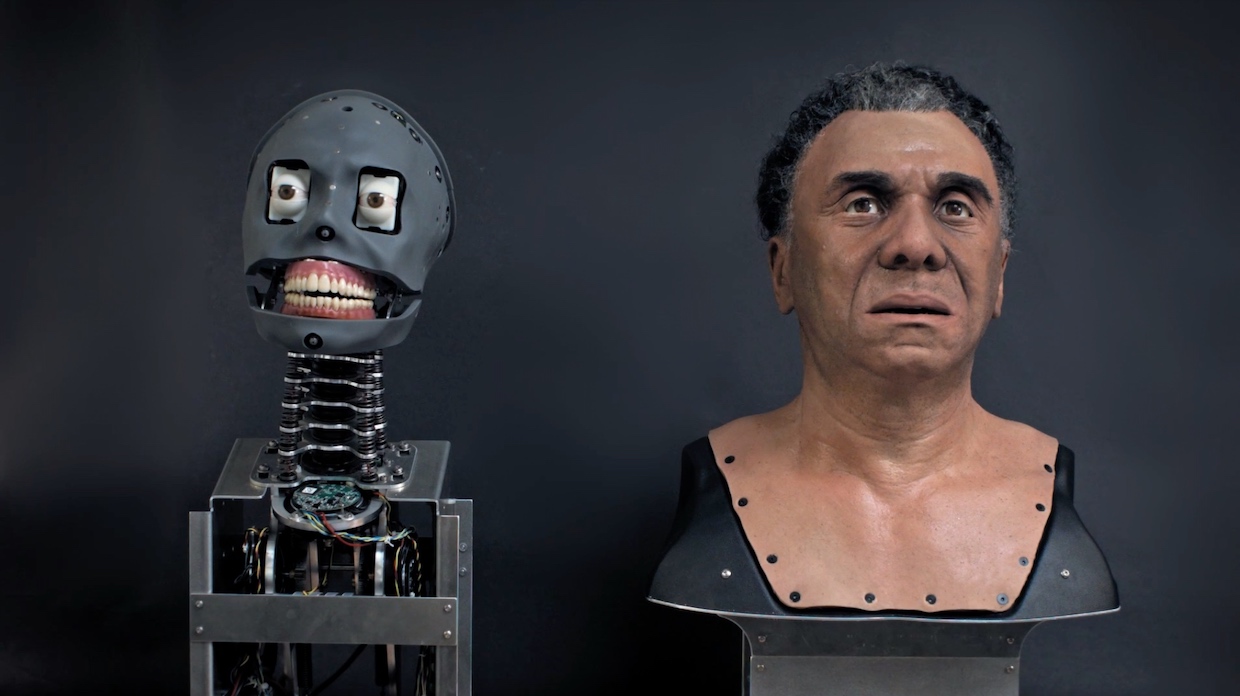
Worked by Designed Expressions, 2 Mesmer Heads play out a synchronized succession. One is finished with exact skin and hair, the other is demonstrating it’s mechanical workings.
As a joint exertion between the CARIS lab and LCI at UBC, we have modified our PR2 to explore between the two research facilities situated in various floors by taking the lift. A definitive objective is to in the long run get PR2 to convey mail and bundles between the two areas.
Elevator riding with a robot as big as the PR2 gets complicated when other humans are involved, but the robot is occasionally polite enough to let people go first. Occasionally.
These shoes utilize pneumatic McKibben muscles to cozy themselves down rather than bands
Lockheed Martin and Drone Racing League reported an advancement rivalry, testing groups to create computerized reasoning (AI) innovation that will empower a self-ruling automaton to race a pilot-worked ramble – and win. Partaking groups will contend in a progression of difficulties for their offer of over $2 million in prizes.
Need an Aibo however can’t bear the cost of an Aibo? Takara Tomy has the following best thing, and it’s solitary US $135
This is a really decent (but short) take a gander at Boeing’s inevitable MQ-25 unmanned bearer based tanker ramble.
This Cozmo business is stunningly better when you have no clue what they’re stating.
This is an exhibit of a robot’s sudden ceasing movements (normal of mechanical impact shirking components) and a novel human-like faltering movements outlined at the CARIS lab. The experimenter is purposefully setting off the two sorts of impact evasion. The human-like planned motions are seen open of delay to human spectators.
The video presents the grown-up measured open-source 3D printed humanoid robot NimbRo-OP2X, which was produced by the Autonomous Intelligent Systems gathering of University of Bonn, Germany.
The Ishikawa Watanabe Laboratory is tied in with doing fascinating stuff by joining fast robots with considerably higher speed cameras. Here’s an example of their past work, including no less than one clasp I haven’t seen previously.
Today at the D60 symposium, scientists bolstered by DARPA’s Fast Lightweight Autonomy (FLA) program exhibited self-ruling trip by a little unmanned flying vehicle outfitted with cameras and sensors and guided by cutting edge self-sufficiency calculations. That product runs a little quadcopter (~5 lbs.) with constrained battery control and locally available PC preparing. As appeared in this video, the FLA framework can advance through another condition with no earlier information of the space, exploring to and from waypoints set by its administrator and autonomously staying away from hindrances in its way.
In any case, who are the general population behind the general population behind the individual behind the robot behind the individual, if the ROBOTT-NET people aren’t sure how to train a robot to sneak up on somebody?
(Video:- Youtube.com)
(Image:- spectrum.ieee.org)



{kind=link}